

Toplam 3 adet sonuctan sayfa basi 1 ile 3 arasi kadar sonuc gösteriliyor
-
19.Eylül.2015, 12:35 #1
 Super Moderator
Super Moderator

- Üyelik tarihi
- 05.Ekim.2013
- Mesajlar
- 334
 47. 6 Sargılı Doğrusal Motorun Arduino İle Çalıştırılması
47. 6 Sargılı Doğrusal Motorun Arduino İle Çalıştırılması
Bir başka forumda ihtiyaç hasıl olmuştu. O nedenle hazırladım. Paylaşıyorum. 6 sargılı doğrusal motora ait arduino programı.
Motorda toplamda 6 sargı mevcut. Sargılar şu düzende enerji alacak:
Toplamda bu 6 sargıya ait 12 çıkış ve bu çıkışlara ait 12 klemens mevcut.
Klemenslere sırasıyla şu polariteleri alıyor.
Klemens 1 = +
Klemens 2 = +
Klemens 7 = -
Klemens 8 = -
Bekle .....ms (Periyot arttıkça frekans küçülür dolayısıyla da hız da azalır)
Klemens 2 = +
Klemens 3 = +
Klemens 8 = -
Klemens 9 = -
Bekle .....ms (Periyot arttıkça frekans küçülür dolayısıyla da hız da azalır)
Klemens 3 = +
Klemens 4 = +
Klemens 9 = -
Klemens 10 = -
Bekle .....ms (Periyot arttıkça frekans küçülür dolayısıyla da hız da azalır)
Klemens 4 = +
Klemens 5 = +
Klemens 10 = -
Klemens 11 = -
Bekle .....ms (Periyot arttıkça frekans küçülür dolayısıyla da hız da azalır)
Klemens 5 = +
Klemens 6 = +
Klemens 11 = -
Klemens 12 = -
Bekle .....ms (Periyot arttıkça frekans küçülür dolayısıyla da hız da azalır)
Klemens 6 = +
Klemens 7 = +
Klemens 12 = -
Klemens 1 = -
Bekle .....ms (Periyot arttıkça frekans küçülür dolayısıyla da hız da azalır)
Klemens 7 = +
Klemens 8 = +
Klemens 1 = -
Klemens 2 = -
Bekle .....ms (Periyot arttıkça frekans küçülür dolayısıyla da hız da azalır)
Klemens 8 = +
Klemens 9 = +
Klemens 2= -
Klemens 3 = -
Bekle .....ms (Periyot arttıkça frekans küçülür dolayısıyla da hız da azalır)
Klemens 9 = +
Klemens 10 = +
Klemens 3 = -
Klemens 4 = -
Bekle .....ms (Periyot arttıkça frekans küçülür dolayısıyla da hız da azalır)
Klemens 10= +
Klemens 11 = +
Klemens 4 = -
Klemens 5 = -
Bekle .....ms (Periyot arttıkça frekans küçülür dolayısıyla da hız da azalır)
Klemens 11 = +
Klemens 12 = +
Klemens 5 = -
Klemens 6 = -
Bekle .....ms (Periyot arttıkça frekans küçülür dolayısıyla da hız da azalır)
Klemens 12= +
Klemens 1 = +
Klemens 6 = -
Klemens 7 = -
Bekle .....ms (Periyot arttıkça frekans küçülür dolayısıyla da hız da azalır)
Buradan sonra başlangıca dönüyor.
Bu senaryoya göre
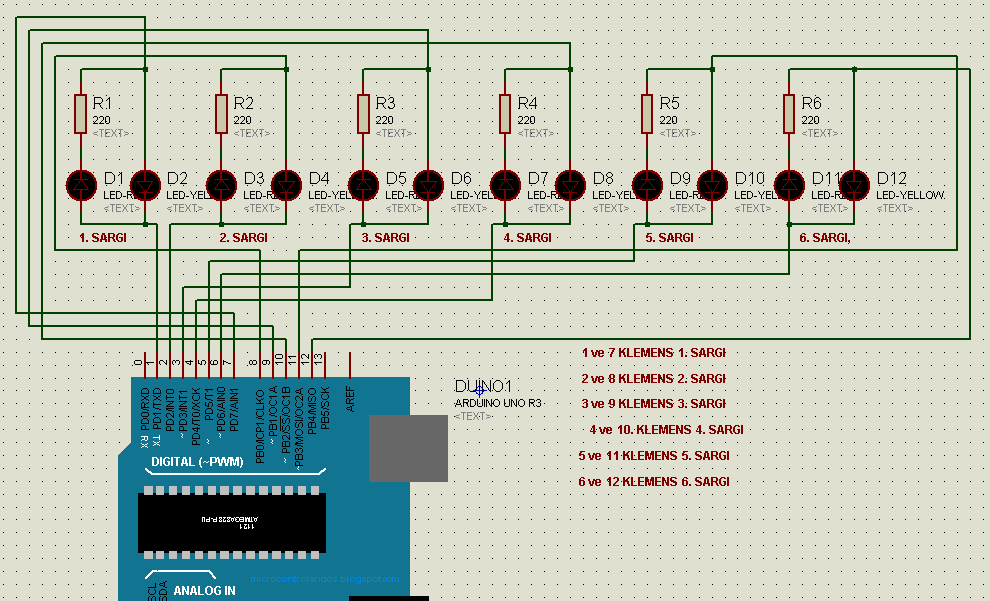
1. ve 7 klemensler 1. sargıya
2. ve 8. klemesler 2. sargıya
3. ve 9. klemesler 3. sargıya
4. ve 10. klemensler 4. sargıya
5. ve 11. klemensler 5. sargıya
6. ve 12. klemensler ise 6. sargıya enerji sağlar.
Yine bu senaryoya göre mikrodenetleyici (arduino) programımız şöyle olacaktır:
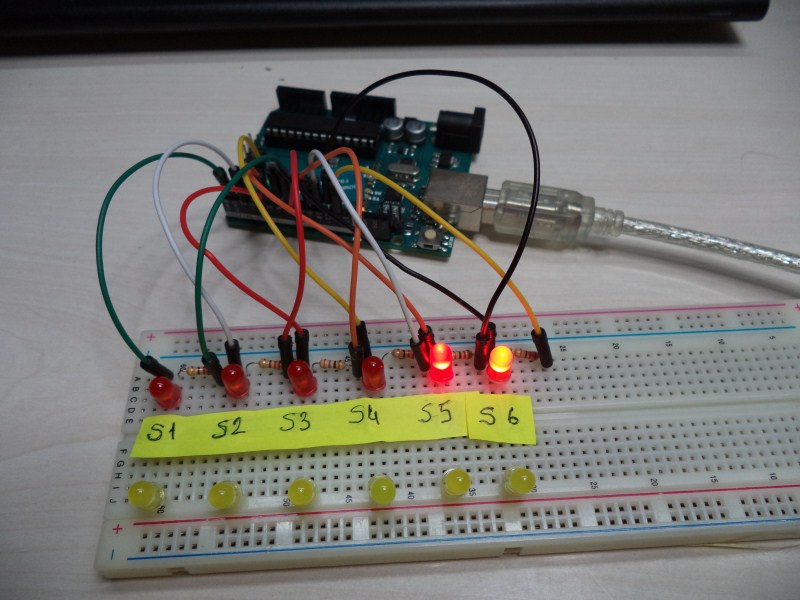
Sarı ve kırmızı ledler ters paralel bağlanmıştır. Kırmızı yandığında sargı klememnslerinde doğru polarize, sarı yandığında ters polarize vardır. Sargı klemenslerine güç transistörleri ile tamponlanmalıdır. Devre bu haliyle sargıları sürmek için yeterli değildir. Orjinal konu ekinde devreye ait ilgili program dosyaları (üyelik gerektirir) mevcuttur.scription">Kod:// DIJITAL CIKIS PIN TANIMLAMALARI BASLADI int CIKIS1 = 1; // DİJİTAL 1 PİNİ int CIKIS2 = 2; // DİJİTAL 2 PİNİ int CIKIS3 = 3; // DİJİTAL 3 PİNİ int CIKIS4 = 4; // DİJİTAL 4 PİNİ int CIKIS5 = 5; // DİJİTAL 5 PİNİ int CIKIS6 = 6; // DİJİTAL 6 PİNİ int CIKIS7 = 7; // DİJİTAL 7 PİNİ int CIKIS8 = 8; // DİJİTAL 8 PİNİ int CIKIS9 = 9; // DİJİTAL 9 PİNİ int CIKIS10 = 10; // DİJİTAL 10 PİNİ int CIKIS11 = 11; // DİJİTAL 11 PİNİ int CIKIS12 = 12; // DİJİTAL 12 PİNİ // DIJITAL CIKIS PIN TANIMLAMALARI BITTI // DIJITAL GIRIS / CIKISLARIN CIKIS MI YOKSA GIRIS MI OLDUKLARININ BELİRTİLMESİ BURADA BAŞLADI void setup() { pinMode(CIKIS1, OUTPUT); // DİJİTAL 1 PİNİ ÇIKIŞ YAPILDI pinMode(CIKIS2, OUTPUT); // DİJİTAL 3 PİNİ ÇIKIŞ YAPILDI pinMode(CIKIS3, OUTPUT); // DİJİTAL 3 PİNİ ÇIKIŞ YAPILDI pinMode(CIKIS4, OUTPUT); // DİJİTAL 4 PİNİ ÇIKIŞ YAPILDI pinMode(CIKIS5, OUTPUT); // DİJİTAL 5 PİNİ ÇIKIŞ YAPILDI pinMode(CIKIS6, OUTPUT); // DİJİTAL 6 PİNİ ÇIKIŞ YAPILDI pinMode(CIKIS7, OUTPUT); // DİJİTAL 7 PİNİ ÇIKIŞ YAPILDI pinMode(CIKIS8, OUTPUT); // DİJİTAL 8 PİNİ ÇIKIŞ YAPILDI pinMode(CIKIS9, OUTPUT); // DİJİTAL 9 PİNİ ÇIKIŞ YAPILDI pinMode(CIKIS10, OUTPUT); // DİJİTAL 10 PİNİ ÇIKIŞ YAPILDI pinMode(CIKIS11, OUTPUT); // DİJİTAL 11 PİNİ ÇIKIŞ YAPILDI pinMode(CIKIS12, OUTPUT); // DİJİTAL 12 PİNİ ÇIKIŞ YAPILDI } // DIJITAL GIRIS / CIKISLARIN CIKIS MI YOKSA GIRIS MI OLDUKLARININ BELİRTİLMESİ BURADA BITTI // ANA PROGRAM BURADA BASLADI void loop() { digitalWrite(CIKIS1, HIGH); digitalWrite(CIKIS2, HIGH); digitalWrite(CIKIS7, LOW); digitalWrite(CIKIS8, LOW); delay(1000); // 1s BEKLE digitalWrite(CIKIS1, LOW); digitalWrite(CIKIS2, LOW); digitalWrite(CIKIS2, HIGH); digitalWrite(CIKIS3, HIGH); digitalWrite(CIKIS8, LOW); digitalWrite(CIKIS9, LOW); delay(1000); // 1s BEKLE digitalWrite(CIKIS2, LOW); digitalWrite(CIKIS3, LOW); digitalWrite(CIKIS3, HIGH); digitalWrite(CIKIS4, HIGH); digitalWrite(CIKIS9, LOW); digitalWrite(CIKIS10, LOW); delay(1000); // 1s BEKLE digitalWrite(CIKIS3, LOW); digitalWrite(CIKIS4, LOW); digitalWrite(CIKIS4, HIGH); digitalWrite(CIKIS5, HIGH); digitalWrite(CIKIS10, LOW); digitalWrite(CIKIS11, LOW); delay(1000); // 1s BEKLE digitalWrite(CIKIS4, LOW); digitalWrite(CIKIS5, LOW); digitalWrite(CIKIS5, HIGH); digitalWrite(CIKIS6, HIGH); digitalWrite(CIKIS11, LOW); digitalWrite(CIKIS12, LOW); delay(1000); // 1s BEKLE digitalWrite(CIKIS5, LOW); digitalWrite(CIKIS6, LOW); digitalWrite(CIKIS6, HIGH); digitalWrite(CIKIS7, HIGH); digitalWrite(CIKIS12, LOW); digitalWrite(CIKIS1, LOW); delay(1000); // 1s BEKLE digitalWrite(CIKIS6, LOW); digitalWrite(CIKIS7, LOW); digitalWrite(CIKIS7, HIGH); digitalWrite(CIKIS8, HIGH); digitalWrite(CIKIS1, LOW); digitalWrite(CIKIS2, LOW); delay(1000); // 1s BEKLE digitalWrite(CIKIS7, LOW); digitalWrite(CIKIS8, LOW); digitalWrite(CIKIS8, HIGH); digitalWrite(CIKIS9, HIGH); digitalWrite(CIKIS2, LOW); digitalWrite(CIKIS3, LOW); delay(1000); // 1s BEKLE digitalWrite(CIKIS8, LOW); digitalWrite(CIKIS9, LOW); digitalWrite(CIKIS9, HIGH); digitalWrite(CIKIS10, HIGH); digitalWrite(CIKIS3, LOW); digitalWrite(CIKIS4, LOW); delay(1000); // 1s BEKLE digitalWrite(CIKIS9, LOW); digitalWrite(CIKIS10, LOW); digitalWrite(CIKIS10, HIGH); digitalWrite(CIKIS11, HIGH); digitalWrite(CIKIS4, LOW); digitalWrite(CIKIS5, LOW); delay(1000); // 1s BEKLE digitalWrite(CIKIS10, LOW); digitalWrite(CIKIS11, LOW); digitalWrite(CIKIS11, HIGH); digitalWrite(CIKIS12, HIGH); digitalWrite(CIKIS5, LOW); digitalWrite(CIKIS6, LOW); delay(1000); // 1s BEKLE digitalWrite(CIKIS11, LOW); digitalWrite(CIKIS12, LOW); digitalWrite(CIKIS12, HIGH); digitalWrite(CIKIS1, HIGH); digitalWrite(CIKIS6, LOW); digitalWrite(CIKIS7, LOW); delay(1000); // 1s BEKLE digitalWrite(CIKIS12, LOW); digitalWrite(CIKIS1, LOW); } // ANA PROGRAM BURADA BITTI
ISIS Devre Şeması
-
Eline sağlık hocam.
-
19.Eylül.2015, 23:29 #3
Super Moderator
- Üyelik tarihi
- 05.Ekim.2013
- Mesajlar
- 334
Teşekkürler Sinan Bey.

 Alıntı
AlıntıKonu Bilgileri
Bu Konuya Gözatan Kullanıcılar
Şu anda 1 kullanıcı bu konuyu görüntülüyor. (0 kayıtlı ve 1 misafir)
Benzer Konular
-
40. Servo motorun 2'şer derece aralıklarla 10 - 180 derece açısal kontrolü
Konu Sahibi bolubeyi Forum Arduino DersleriCevap: 0Son Mesaj : 11.Ağustos.2015, 17:39 -
38. 2 DC motorun ileri geri kontrolü
Konu Sahibi bolubeyi Forum Arduino DersleriCevap: 0Son Mesaj : 07.Ağustos.2015, 00:09 -
33. Potansiyometre ile servo motorun açısal kontrolü
Konu Sahibi bolubeyi Forum Arduino DersleriCevap: 0Son Mesaj : 23.Temmuz.2015, 01:34 -
6. Arduino Programlama ve arduino programının kurulması
Konu Sahibi bolubeyi Forum Arduino DersleriCevap: 0Son Mesaj : 08.Haziran.2015, 20:33 -
Uyap Döküman Editörünün linux sistemlerde çalıştırılması. (UDF Editör)
Konu Sahibi erkolay Forum Linux - UnixCevap: 0Son Mesaj : 06.Şubat.2015, 22:02






ForeverAutoHits Ücretsiz, Sınırsız...
Bugün, 13:32 in Hit Kaynakları