

Toplam 3 adet sonuctan sayfa basi 1 ile 3 arasi kadar sonuc gösteriliyor
Konulanmış Görüntüleme


-
26.Ağustos.2015, 20:12 #1
 Super Moderator
Super Moderator

- Üyelik tarihi
- 05.Ekim.2013
- Mesajlar
- 334
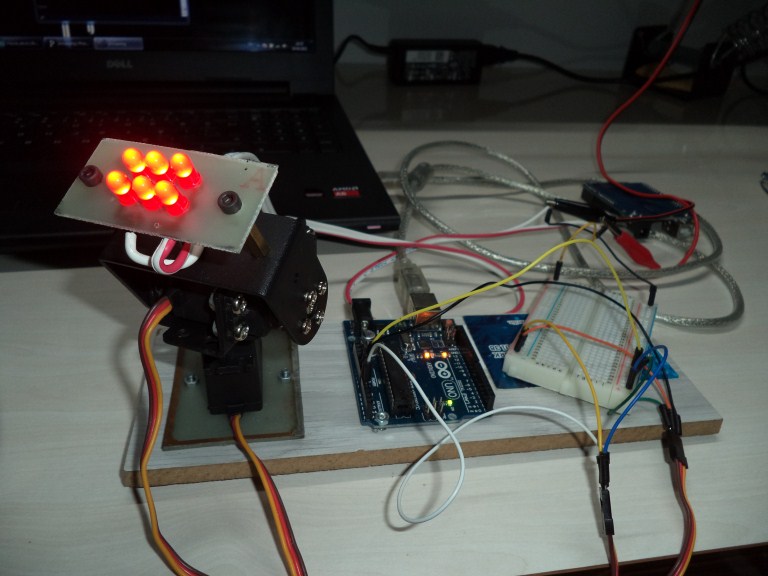
 42. Mause ile 2 eksen kontrol
42. Mause ile 2 eksen kontrol
Bu dersimizde bir platformu mause ile 2 eksen (sağ - sol ve yukarı - aşağı) hareket ettirmeyi öğreneceğiz. Platforma ben örnek olarak bir kaç tane led bağladım. Led yerine kamera ya da projektör gibi başka metaryeller bağlayarak bu metaryalleri 2 eksen kontrol edebilirsiniz. PC arayüzü olarak processingi kullanacağız. İhtiyaç duyulması halinde konuya ait dosyaları orjinal konu ekinden (üyelik gerektirir)indirebilirsiniz.
Malzeme listesi:
Arduino uno
2 adet servo motor
Pan tilt servo motor montaj kiti
DC güç kaynağı (Pil ya daadaptör 6 Volt)
Bağlantı kaboları
Deney bordu
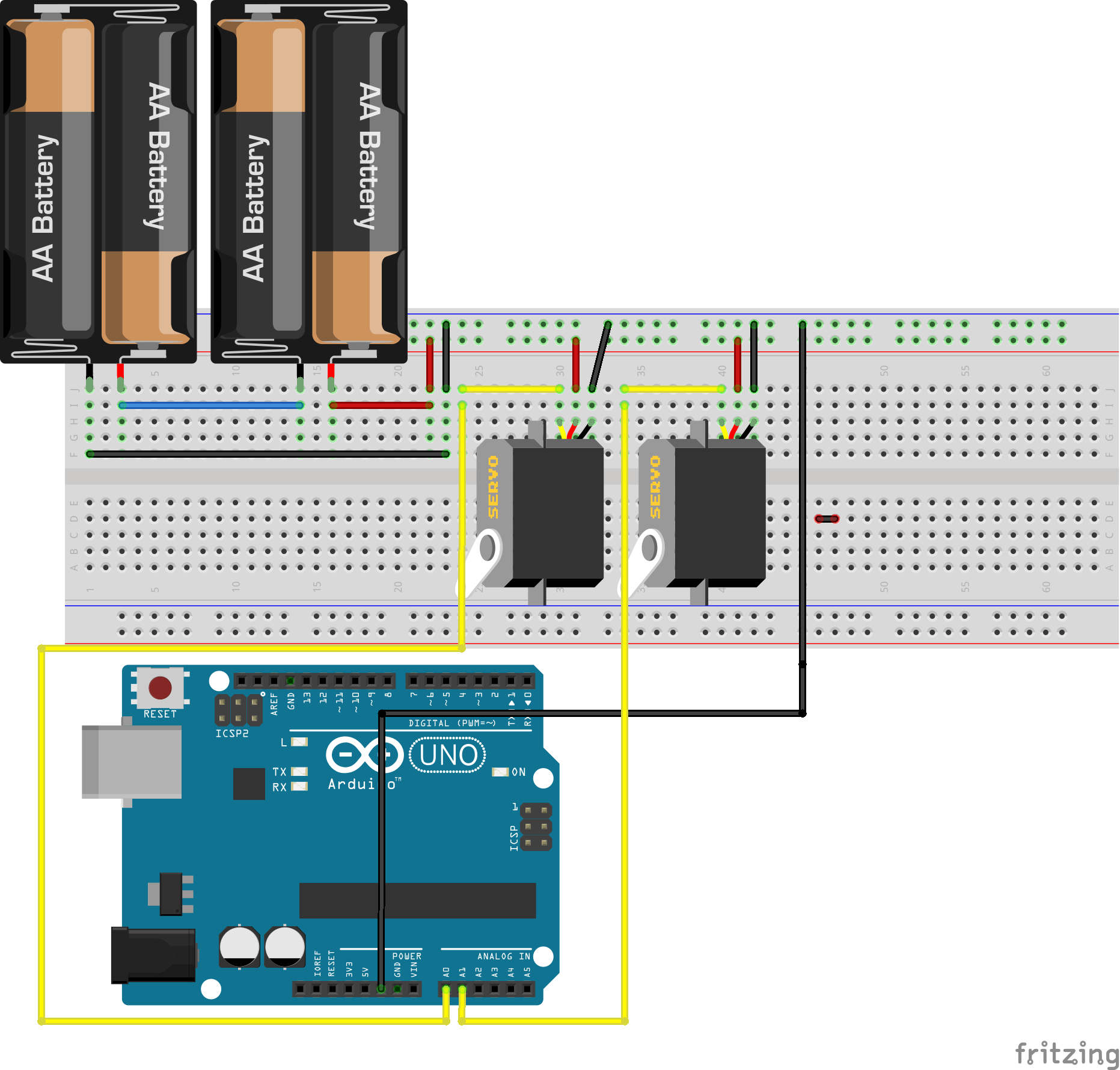
Fritzing çizimi:
Arduino kodlarımız:
Processing kodlarımız:description">Kod:#include <Servo.h> Servo yservo; Servo xservo; // servos for x and y //set initial values for x and y int ypos = 0; int xpos= 0; void setup(){ xservo.attach(14); //(analog pin 0) for the x servo yservo.attach(15); //(analog pin 1) for the y server Serial.begin(19200); // 19200 is the rate of communication Serial.println("Rolling"); // some output for debug purposes. } void loop() { static int v = 0; // value to be sent to the servo (0-180) if ( Serial.available()) { char ch = Serial.read(); // read in a character from the serial port and assign to ch switch(ch) { // switch based on the value of ch case '0'...'9': // if it's numeric v = v * 10 + ch - '0'; /* so if the chars sent are 45x (turn x servo to 45 degs).. v is the value we want to send to the servo and it is currently 0 The first char (ch) is 4 so 0*10 = 0 + 4 - 0 = 4; Second char is 4; 4*10 = 40 + 5 = 45 - 0 = 45; Third char is not a number(0-9) so we drop through... */ break; case 'x': // if it's x /* ....and land here where we send the value of v which is now 45 to the x servo and then reset v to 0 */ xservo.write(v); v = 0; break; case 'y': yservo.write(v); v = 0; break; } } }
Kod:import processing.serial.*; int xpos=90; // set x servo's value to mid point (0-180); int ypos=90; // and the same here Serial port; // The serial port we will be using void setup() { size(360, 360); frameRate(100); println(Serial.list()); // List COM-ports //select second com-port from the list (COM3 for my device) // You will want to change the [1] to select the correct device // Remember the list starts at [0] for the first option. port = new Serial(this, Serial.list()[0], 19200); } void draw() { fill(175); rect(0,0,360,360); fill(255,0,0); //rgb value so RED rect(180, 175, mouseX-180, 10); //xpos, ypos, width, height fill(0,255,0); // and GREEN rect(175, 180, 10, mouseY-180); update(mouseX, mouseY); } void update(int x, int y) { //Calculate servo postion from mouseX xpos= x/2; ypos = y/2; //Output the servo position ( from 0 to 180) port.write(xpos+"x"); port.write(ypos+"y"); }

 Alıntı
AlıntıKonu Bilgileri
Bu Konuya Gözatan Kullanıcılar
Şu anda 1 kullanıcı bu konuyu görüntülüyor. (0 kayıtlı ve 1 misafir)
Benzer Konular
-
44. 2 eksen XY Joystick Modül ile servo kontrolü
Konu Sahibi bolubeyi Forum Arduino DersleriCevap: 0Son Mesaj : 13.Eylül.2015, 02:24 -
43. 2 Eksen Güneş Paneli
Konu Sahibi bolubeyi Forum Arduino DersleriCevap: 0Son Mesaj : 12.Eylül.2015, 17:38 -
39. 2 eksen hareket izleyen robot
Konu Sahibi bolubeyi Forum Arduino DersleriCevap: 1Son Mesaj : 10.Ağustos.2015, 18:47 -
11. Mouse ile led kontrol
Konu Sahibi bolubeyi Forum Arduino DersleriCevap: 0Son Mesaj : 13.Haziran.2015, 18:34 -
Web üzerinden uzaktan kontrol
Konu Sahibi WeBMasteR Forum Kurulum - İlk İşlemlerCevap: 0Son Mesaj : 19.Ekim.2013, 19:54






Shopsocks5.com - Service Socks5...
03.Mayıs.2024, 05:31 in Güncel Proxy Adresleri